



Alberto Comoretto
@albertocomoretto.bsky.social
Postdoc at KU Leuven.
I research squishy machines and autonomous soft matter 🦠 🤖
Inflatables 🎈 fluidics 🫧 mechanical instabilities ⛓️💥 and self-oscillators 🌀
https://www.albertocomoretto.com/
I research squishy machines and autonomous soft matter 🦠 🤖
Inflatables 🎈 fluidics 🫧 mechanical instabilities ⛓️💥 and self-oscillators 🌀
https://www.albertocomoretto.com/
(9/9)
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
August 26, 2025 at 4:54 PM
(9/9)
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
(8/9)
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
August 26, 2025 at 4:54 PM
(8/9)
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
Can soft machines remember past events using their body, without any processor? 💭
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
August 26, 2025 at 4:54 PM
Can soft machines remember past events using their body, without any processor? 💭
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
(5/6)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
May 8, 2025 at 6:15 PM
(5/6)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
(4/6)
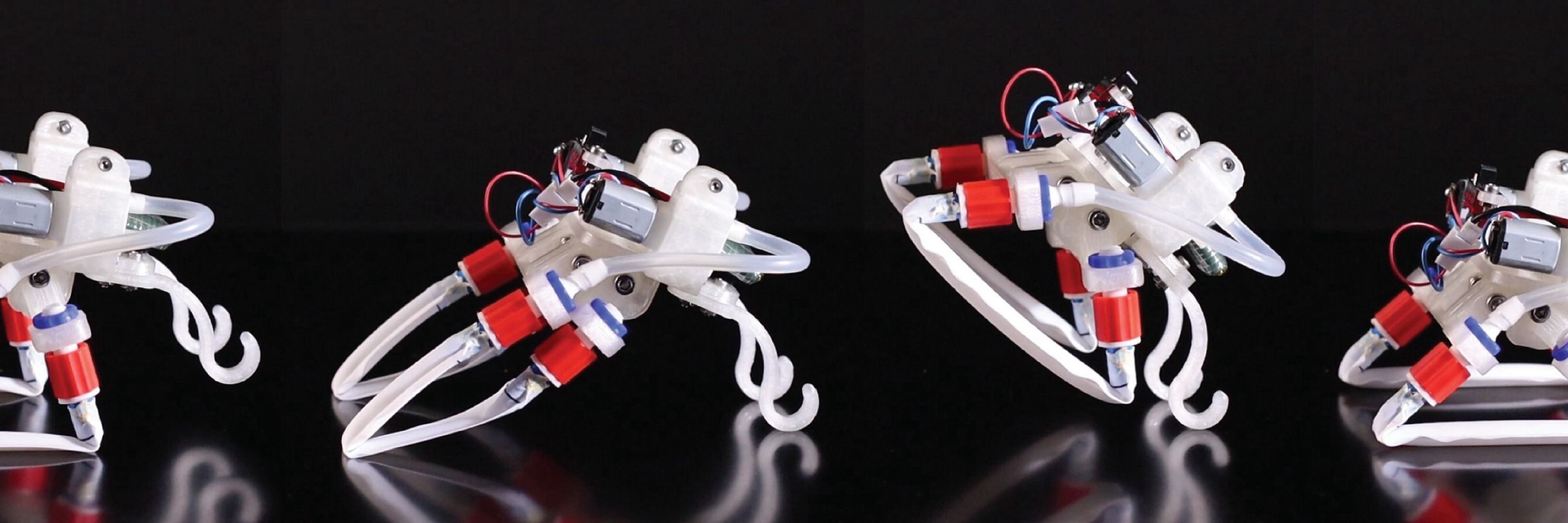
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
May 8, 2025 at 6:15 PM
(4/6)
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
(2/6)
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
May 8, 2025 at 6:15 PM
(2/6)
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
Autonomous locomotion simply with tubes as limbs, and no brain? 🎈🤖
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
May 8, 2025 at 6:15 PM
Autonomous locomotion simply with tubes as limbs, and no brain? 🎈🤖
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Thank you again for the talk Kate! ✨
April 27, 2025 at 4:18 PM
Thank you again for the talk Kate! ✨