



Alberto Comoretto
@albertocomoretto.bsky.social
Postdoc at KU Leuven.
I research squishy machines and autonomous soft matter 🦠 🤖
Inflatables 🎈 fluidics 🫧 mechanical instabilities ⛓️💥 and self-oscillators 🌀
https://www.albertocomoretto.com/
I research squishy machines and autonomous soft matter 🦠 🤖
Inflatables 🎈 fluidics 🫧 mechanical instabilities ⛓️💥 and self-oscillators 🌀
https://www.albertocomoretto.com/
(9/9)
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
August 26, 2025 at 4:54 PM
(9/9)
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
One last note: the machine is doing all this with a single, constant pressure source as input, and nothing else. 🤯
That's it, folks! Here you find all the details (open access), in case you are curious:
www.cell.com/device/fullt...
(8/9)
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
August 26, 2025 at 4:54 PM
(8/9)
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
Here is the final soft machine in action. What I find cool is the temporary nature of the short-term mechanical memory! After a retention time (tunable by design), the machine purposefully "forgets" that the interaction even occurred, going back to the default forward-locomoting behavior. 🧪⚛️
(7/9)
To build a fully autonomous machine, we added two antennae with soft tubes at the hinge. The tubes kink and unkink when the flagellum touches obstacles, allowing the machine to detect them. In short-term memory settings, the machine temporarily steers away from the obstacle, avoiding it! 🕺
To build a fully autonomous machine, we added two antennae with soft tubes at the hinge. The tubes kink and unkink when the flagellum touches obstacles, allowing the machine to detect them. In short-term memory settings, the machine temporarily steers away from the obstacle, avoiding it! 🕺

August 26, 2025 at 4:54 PM
(7/9)
To build a fully autonomous machine, we added two antennae with soft tubes at the hinge. The tubes kink and unkink when the flagellum touches obstacles, allowing the machine to detect them. In short-term memory settings, the machine temporarily steers away from the obstacle, avoiding it! 🕺
To build a fully autonomous machine, we added two antennae with soft tubes at the hinge. The tubes kink and unkink when the flagellum touches obstacles, allowing the machine to detect them. In short-term memory settings, the machine temporarily steers away from the obstacle, avoiding it! 🕺
(6/9)
We can now integrate all elements (self-oscillators, memory shells, fluidic circuits, and kinking tubes) in a complete soft machine. When left to explore an environment, the machine senses interactions with users and programs its behavior accordingly, memorizing the past interaction.
We can now integrate all elements (self-oscillators, memory shells, fluidic circuits, and kinking tubes) in a complete soft machine. When left to explore an environment, the machine senses interactions with users and programs its behavior accordingly, memorizing the past interaction.

August 26, 2025 at 4:54 PM
(6/9)
We can now integrate all elements (self-oscillators, memory shells, fluidic circuits, and kinking tubes) in a complete soft machine. When left to explore an environment, the machine senses interactions with users and programs its behavior accordingly, memorizing the past interaction.
We can now integrate all elements (self-oscillators, memory shells, fluidic circuits, and kinking tubes) in a complete soft machine. When left to explore an environment, the machine senses interactions with users and programs its behavior accordingly, memorizing the past interaction.
(5/9)
We then built soft valves that open and close when gently touched. We used tubes that form kinks when bent (similar to what happens when you block water in the gardening hose by kinking it). It works well in transducing mechanical information (touch) into fluidic (channels closing/opening).
We then built soft valves that open and close when gently touched. We used tubes that form kinks when bent (similar to what happens when you block water in the gardening hose by kinking it). It works well in transducing mechanical information (touch) into fluidic (channels closing/opening).

August 26, 2025 at 4:54 PM
(5/9)
We then built soft valves that open and close when gently touched. We used tubes that form kinks when bent (similar to what happens when you block water in the gardening hose by kinking it). It works well in transducing mechanical information (touch) into fluidic (channels closing/opening).
We then built soft valves that open and close when gently touched. We used tubes that form kinks when bent (similar to what happens when you block water in the gardening hose by kinking it). It works well in transducing mechanical information (touch) into fluidic (channels closing/opening).
(4/9)
We had to apply a high force to snap the shell to the other stable state. To enable smooth interactions with the surroundings, we came up with fluidic circuits that surround the shell. With valves that open and close, we can repeatably write the memory, both in long- and short-term fashion.
We had to apply a high force to snap the shell to the other stable state. To enable smooth interactions with the surroundings, we came up with fluidic circuits that surround the shell. With valves that open and close, we can repeatably write the memory, both in long- and short-term fashion.

August 26, 2025 at 4:54 PM
(4/9)
We had to apply a high force to snap the shell to the other stable state. To enable smooth interactions with the surroundings, we came up with fluidic circuits that surround the shell. With valves that open and close, we can repeatably write the memory, both in long- and short-term fashion.
We had to apply a high force to snap the shell to the other stable state. To enable smooth interactions with the surroundings, we came up with fluidic circuits that surround the shell. With valves that open and close, we can repeatably write the memory, both in long- and short-term fashion.
(3/9)
Having that in mind, we realized that, once we provide bistability to this capacitance using elastic shells, the output behavior is also bistable. This means that the system embodies memory: the speed of the machine at time t reflects the past snapping of the shell that occurred at time t*<t.
Having that in mind, we realized that, once we provide bistability to this capacitance using elastic shells, the output behavior is also bistable. This means that the system embodies memory: the speed of the machine at time t reflects the past snapping of the shell that occurred at time t*<t.


August 26, 2025 at 4:54 PM
(3/9)
Having that in mind, we realized that, once we provide bistability to this capacitance using elastic shells, the output behavior is also bistable. This means that the system embodies memory: the speed of the machine at time t reflects the past snapping of the shell that occurred at time t*<t.
Having that in mind, we realized that, once we provide bistability to this capacitance using elastic shells, the output behavior is also bistable. This means that the system embodies memory: the speed of the machine at time t reflects the past snapping of the shell that occurred at time t*<t.
(2/9)
We started by observing that, in a self-oscillating soft machine, the locomotion speed is a function of an internal physical parameter: the fluidic capacitance. If we tune that parameter (which is, simply put, the size of an air container), we can directly change the behavior of the machine
We started by observing that, in a self-oscillating soft machine, the locomotion speed is a function of an internal physical parameter: the fluidic capacitance. If we tune that parameter (which is, simply put, the size of an air container), we can directly change the behavior of the machine

August 26, 2025 at 4:54 PM
(2/9)
We started by observing that, in a self-oscillating soft machine, the locomotion speed is a function of an internal physical parameter: the fluidic capacitance. If we tune that parameter (which is, simply put, the size of an air container), we can directly change the behavior of the machine
We started by observing that, in a self-oscillating soft machine, the locomotion speed is a function of an internal physical parameter: the fluidic capacitance. If we tune that parameter (which is, simply put, the size of an air container), we can directly change the behavior of the machine
Can soft machines remember past events using their body, without any processor? 💭
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
August 26, 2025 at 4:54 PM
Can soft machines remember past events using their body, without any processor? 💭
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
Out now in Device (Cell Press @cellpress.bsky.social), we harness bistable elastic shells to program and memorize locomotion behaviors upon interactions with the surroundings. 🎈🐙
🧪⚛️ www.doi.org/10.1016/j.de...
(1/9)
(6/6) 🧪 ⚛️
In the past few years, playing with these devices taught me that seemingly simple objects hide a great deal of complexity, ready to be explored. 🤹♂️
Thanks to co-authors Mannus Schomaker and Bas Overvelde for this fun adventure!
@amolf-nl.bsky.social
@science.org
Our group: overvelde.com
In the past few years, playing with these devices taught me that seemingly simple objects hide a great deal of complexity, ready to be explored. 🤹♂️
Thanks to co-authors Mannus Schomaker and Bas Overvelde for this fun adventure!
@amolf-nl.bsky.social
@science.org
Our group: overvelde.com

May 8, 2025 at 6:15 PM
(6/6) 🧪 ⚛️
In the past few years, playing with these devices taught me that seemingly simple objects hide a great deal of complexity, ready to be explored. 🤹♂️
Thanks to co-authors Mannus Schomaker and Bas Overvelde for this fun adventure!
@amolf-nl.bsky.social
@science.org
Our group: overvelde.com
In the past few years, playing with these devices taught me that seemingly simple objects hide a great deal of complexity, ready to be explored. 🤹♂️
Thanks to co-authors Mannus Schomaker and Bas Overvelde for this fun adventure!
@amolf-nl.bsky.social
@science.org
Our group: overvelde.com
(5/6)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
May 8, 2025 at 6:15 PM
(5/6)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
Robots with coupled limbs display responsive behaviors: they autonomously avoid obstacles and even change locomotion gait when transitioning from ground to water, without control inputs! All of this by moving pretty fast and efficiently. 💃
(This video is in real time)
(4/6)
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
May 8, 2025 at 6:15 PM
(4/6)
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
By physical synchronization of multiple limbs through internal interconnections or interactions with the environment, robust and fast locomotion gaits dynamically emerge without the need for centralized processors. They go in sync even at 300 oscillations per second!
(3/6)
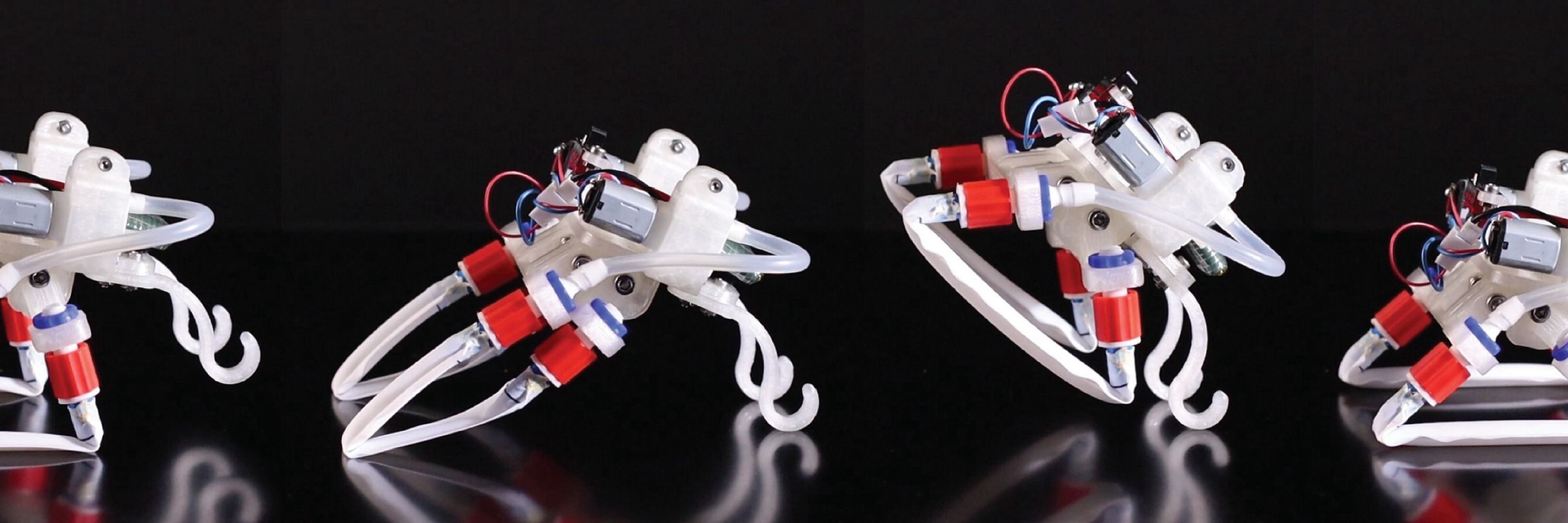
The tubes become self-oscillating limbs of locomoting robots, intrinsically coordinating their (asymmetric) stepping motion!
The tubes become self-oscillating limbs of locomoting robots, intrinsically coordinating their (asymmetric) stepping motion!

May 8, 2025 at 6:15 PM
(3/6)
The tubes become self-oscillating limbs of locomoting robots, intrinsically coordinating their (asymmetric) stepping motion!
The tubes become self-oscillating limbs of locomoting robots, intrinsically coordinating their (asymmetric) stepping motion!
(2/6)
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
May 8, 2025 at 6:15 PM
(2/6)
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
We show that a soft tube undergoes kink wave instabilities when powered with a constant stream of air. Spontaneously, kinks form, travel, and then disappear along the tube itself.
Autonomous locomotion simply with tubes as limbs, and no brain? 🎈🤖
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
May 8, 2025 at 6:15 PM
Autonomous locomotion simply with tubes as limbs, and no brain? 🎈🤖
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Yes, through physical synchronization! Our article is out today in Science (@science.org)
Article: www.science.org/doi/10.1126/...
Authors: @albertocomoretto.bsky.social, H.A.H. Schomaker, J.T.B. Overvelde
More below 🧪 ⚛️
(1/6)
Thank you again for the talk Kate! ✨
April 27, 2025 at 4:18 PM
Thank you again for the talk Kate! ✨
The model informs an updated design that removes the regulation mode, useful for pulsatile activation of implanted soft artificial hearths that shouldn’t stop beating 🫀
We hope these math tools can inspire other soft roboticists to better understand the physics of nonlinear, deformable devices 🫧🎈
We hope these math tools can inspire other soft roboticists to better understand the physics of nonlinear, deformable devices 🫧🎈

March 26, 2025 at 8:23 PM
The model informs an updated design that removes the regulation mode, useful for pulsatile activation of implanted soft artificial hearths that shouldn’t stop beating 🫀
We hope these math tools can inspire other soft roboticists to better understand the physics of nonlinear, deformable devices 🫧🎈
We hope these math tools can inspire other soft roboticists to better understand the physics of nonlinear, deformable devices 🫧🎈
With a coupled mechanical-fluidic analytical model of the ketchup valve, we explain the coexistence of two dynamic modes (pressure oscillation and regulation) given the same boundary conditions. We also dive into studying their stability 🌀

March 26, 2025 at 7:51 PM
With a coupled mechanical-fluidic analytical model of the ketchup valve, we explain the coexistence of two dynamic modes (pressure oscillation and regulation) given the same boundary conditions. We also dive into studying their stability 🌀
The first paper of my PhD is about a strange phenomenon peculiar to ketchup bottle valves 💧🥫 You may already have experienced that annoying sputtering when you squeeze ketchup out of the bottle. But not always, right?
🧪⚛️
www.sciencedirect.com/science/arti...
🧪⚛️
www.sciencedirect.com/science/arti...


March 26, 2025 at 7:51 PM
The first paper of my PhD is about a strange phenomenon peculiar to ketchup bottle valves 💧🥫 You may already have experienced that annoying sputtering when you squeeze ketchup out of the bottle. But not always, right?
🧪⚛️
www.sciencedirect.com/science/arti...
🧪⚛️
www.sciencedirect.com/science/arti...