




Kalhan
@kalhansb.bsky.social
PhD student, cooperative perception in multi robot systems @Nottingham Trent University
#MachineLearning #Robotics #ROS2 #Gazebo 👨💻
#MachineLearning #Robotics #ROS2 #Gazebo 👨💻
Reposted by Kalhan

I'm proud to chair this initiative, bringing together leading scientists, students, and volunteers to build an open and sustainable ecosystem for neuromorphics.
Check it out and sign up. We can use your help :-)
Check it out and sign up. We can use your help :-)

#OpenNeuromorphic is more than a community; it is a movement. We are building the future of brain-inspired AI and hardware through open collaboration, global education, and radical curiosity.
Join us as we reimagine intelligence together.
open-neuromorphic.org
#ONM #Brain-inspired #Hardware #SNN
Join us as we reimagine intelligence together.
open-neuromorphic.org
#ONM #Brain-inspired #Hardware #SNN

Open Neuromorphic
Explore the world of Neuromorphic Computing, AI, and Devices in an open-source community. Join us for educational content, and collaborative innovation
open-neuromorphic.org
November 6, 2025 at 8:39 AM
I'm proud to chair this initiative, bringing together leading scientists, students, and volunteers to build an open and sustainable ecosystem for neuromorphics.
Check it out and sign up. We can use your help :-)
Check it out and sign up. We can use your help :-)
Reposted by Kalhan

Today, OpenAI's ChatGPT handles 2.5 billion queries per day; the electricity used is equivalent to fully charging 14,000 electric vehicles. Get the big picture on energy use as we scale up to all generative AI queries per year, both now and in 2030.
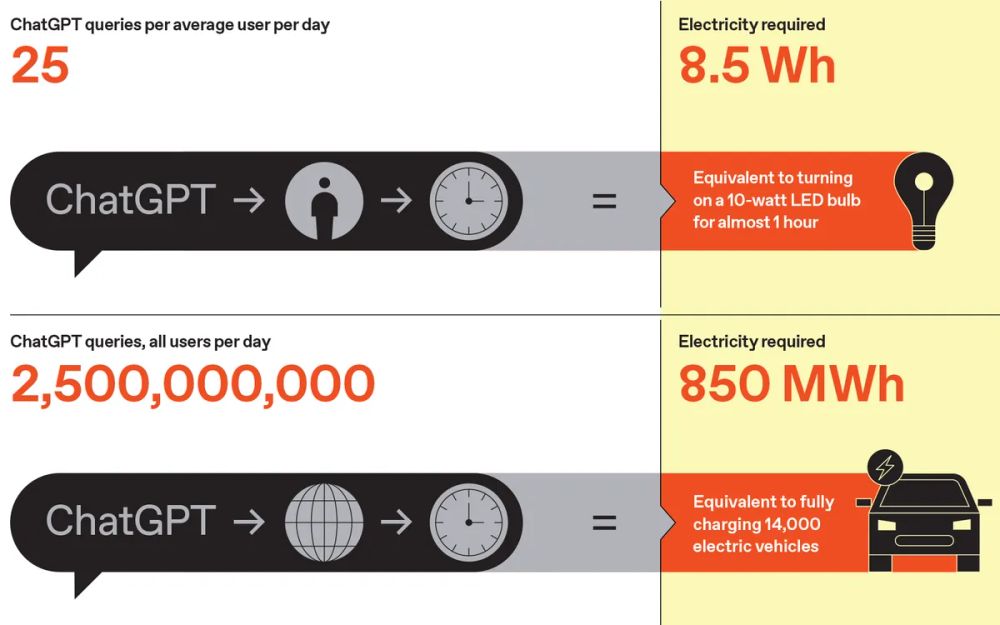
How Much Energy Does It Take to Power Billions of AI Queries?
All generative AI queries could hit 329 billion per day by 2030. See the big picture on AI's energy use and how it's reshaping our world.
spectrum.ieee.org
October 1, 2025 at 1:01 PM
Today, OpenAI's ChatGPT handles 2.5 billion queries per day; the electricity used is equivalent to fully charging 14,000 electric vehicles. Get the big picture on energy use as we scale up to all generative AI queries per year, both now and in 2030.
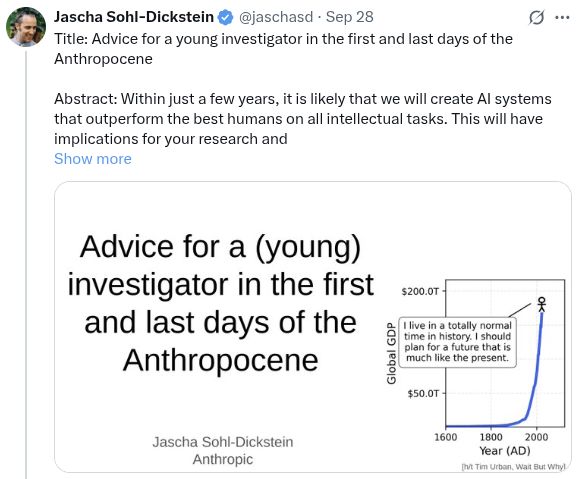
This thread from @jaschasd at @AnthropicAI is a major wake-up call for early-career researchers, especially in #robotics.
We must build things that scale with intelligence, not compete with it.
Thread: x.com/jaschasd/sta...
#AGI #ComputerVision #PhDLife #EmbodiedAI
We must build things that scale with intelligence, not compete with it.
Thread: x.com/jaschasd/sta...
#AGI #ComputerVision #PhDLife #EmbodiedAI
October 1, 2025 at 10:47 AM
This thread from @jaschasd at @AnthropicAI is a major wake-up call for early-career researchers, especially in #robotics.
We must build things that scale with intelligence, not compete with it.
Thread: x.com/jaschasd/sta...
#AGI #ComputerVision #PhDLife #EmbodiedAI
We must build things that scale with intelligence, not compete with it.
Thread: x.com/jaschasd/sta...
#AGI #ComputerVision #PhDLife #EmbodiedAI
Reposted by Kalhan

Most of the "90% of code written by AI" claims come from vendors selling AI tools and lack credibility as a result
Armin (creator of Flask, Jinja, Click) is different - when he says 90% of a new significant infrastructure project he's building was AI generated that's worth paying attention to
Armin (creator of Flask, Jinja, Click) is different - when he says 90% of a new significant infrastructure project he's building was AI generated that's worth paying attention to

“Is 90% of code going to be written by AI? I don’t know. What I do know is, that for me, on this project, the answer is already yes.” lucumr.pocoo.org/2025/9/29/90...

90%
AI is writing 90% of the code I was in charge of
lucumr.pocoo.org
September 29, 2025 at 4:27 PM
Most of the "90% of code written by AI" claims come from vendors selling AI tools and lack credibility as a result
Armin (creator of Flask, Jinja, Click) is different - when he says 90% of a new significant infrastructure project he's building was AI generated that's worth paying attention to
Armin (creator of Flask, Jinja, Click) is different - when he says 90% of a new significant infrastructure project he's building was AI generated that's worth paying attention to
Reposted by Kalhan

Researchers at the University of Warwick have trialled a drone-delivery system to transport defibrillators directly to the scene of a cardiac emergency, dramatically cutting response times and increasing patients' chances of survival. 🤖 interestingengineering.com/innovation/u... #Robots #Robotics

Life-saving drones tested to reach patients faster than ambulances
UK researchers have successfully tested drones carrying defibrillators to cardiac arrest emergencies, potentially doubling survival chances.
interestingengineering.com
September 15, 2025 at 10:16 AM
Researchers at the University of Warwick have trialled a drone-delivery system to transport defibrillators directly to the scene of a cardiac emergency, dramatically cutting response times and increasing patients' chances of survival. 🤖 interestingengineering.com/innovation/u... #Robots #Robotics
Reposted by Kalhan




September 11, 2025 at 1:54 PM
Reposted by Kalhan
SpatialVID: A Large-Scale Video Dataset with Spatial Annotations
Jiahao Wang, Yufeng Yuan, Rujie Zheng, Youtian Lin, Jian Gao, Lin-Zhuo Chen, Yajie Bao, Yi Zhang, Chang Zeng, Yanxi Zhou, Xiaoxiao Long, Hao Zhu, Zhaoxiang Zhang, Xun Cao, Yao Yao
tl;dr: in title
arxiv.org/abs/2509.09676
Jiahao Wang, Yufeng Yuan, Rujie Zheng, Youtian Lin, Jian Gao, Lin-Zhuo Chen, Yajie Bao, Yi Zhang, Chang Zeng, Yanxi Zhou, Xiaoxiao Long, Hao Zhu, Zhaoxiang Zhang, Xun Cao, Yao Yao
tl;dr: in title
arxiv.org/abs/2509.09676




September 12, 2025 at 12:10 PM
SpatialVID: A Large-Scale Video Dataset with Spatial Annotations
Jiahao Wang, Yufeng Yuan, Rujie Zheng, Youtian Lin, Jian Gao, Lin-Zhuo Chen, Yajie Bao, Yi Zhang, Chang Zeng, Yanxi Zhou, Xiaoxiao Long, Hao Zhu, Zhaoxiang Zhang, Xun Cao, Yao Yao
tl;dr: in title
arxiv.org/abs/2509.09676
Jiahao Wang, Yufeng Yuan, Rujie Zheng, Youtian Lin, Jian Gao, Lin-Zhuo Chen, Yajie Bao, Yi Zhang, Chang Zeng, Yanxi Zhou, Xiaoxiao Long, Hao Zhu, Zhaoxiang Zhang, Xun Cao, Yao Yao
tl;dr: in title
arxiv.org/abs/2509.09676
Reposted by Kalhan

🤖 Haven't re-upped this in... Like ever!
If you are interested in the robotics community in Colorado check out this list 👇
If you do robotics in CO and aren't on the list, I can add you!
If you are interested in the robotics community in Colorado check out this list 👇
If you do robotics in CO and aren't on the list, I can add you!
🤖 I'm putting together a list of people and accounts connected to the robotics robotics community in Colorado!
Let me know if you know of anyone I should add 😊
go.bsky.app/UPwPd9q
Let me know if you know of anyone I should add 😊
go.bsky.app/UPwPd9q
September 13, 2025 at 8:52 PM
🤖 Haven't re-upped this in... Like ever!
If you are interested in the robotics community in Colorado check out this list 👇
If you do robotics in CO and aren't on the list, I can add you!
If you are interested in the robotics community in Colorado check out this list 👇
If you do robotics in CO and aren't on the list, I can add you!
I would like a box like robot to do my work without even me realising it's done. A very very smart dishwasher integrated into my home.
Several companies are pouring millions of dollars into creating #humanoid #robots for the home. But do consumers want humanoid robots in their houses, or will they want more "robotic-looking" assistants? spectrum.ieee.org/home-humanoi...

September 14, 2025 at 3:09 PM
I would like a box like robot to do my work without even me realising it's done. A very very smart dishwasher integrated into my home.
Reposted by Kalhan
I thought I wouldn‘t be one of those academics super into outreach talks, but I just put together something about understanding LLMs for laypeople and I get to talk about results that I don’t really focus on in any of my technical talks! It’s actually really cool. I made this lil takeaway slide

September 10, 2025 at 1:21 PM
I thought I wouldn‘t be one of those academics super into outreach talks, but I just put together something about understanding LLMs for laypeople and I get to talk about results that I don’t really focus on in any of my technical talks! It’s actually really cool. I made this lil takeaway slide
Reposted by Kalhan
Humans don’t fully trust the #AI #agents that are coding for them, and with good reason. New research shows that AI agents still fall short when it comes to huge codebases, extended context over many lines of code, and long-term planning on structure and design. spectrum.ieee.org/ai-for-coding

September 6, 2025 at 2:30 PM
Humans don’t fully trust the #AI #agents that are coding for them, and with good reason. New research shows that AI agents still fall short when it comes to huge codebases, extended context over many lines of code, and long-term planning on structure and design. spectrum.ieee.org/ai-for-coding
Reposted by Kalhan
What if your vehicle could predict accidents? Nauto's AI dashcam offers real-time alerts to keep drivers safe and informed.

Nauto’s AI Dashcam Outperforms Rivals in Driver Safety Tests
Nauto's dashcam offers more than monitoring—it's about shaping safer driving habits with real-time alerts and coaching.
spectrum.ieee.org
September 6, 2025 at 1:01 PM
What if your vehicle could predict accidents? Nauto's AI dashcam offers real-time alerts to keep drivers safe and informed.
Reposted by Kalhan
Curious about #neuromorphic computing? 🧠💻
We want to revolutionalize the way we program brain-inspired systems and are plotting a course in a new publication with Steven Abreu: ieeexplore.ieee.org/abstract/doc... (or open access arxiv.org/abs/2410.22352)
Let's build better neuromorphics together! 🚀
We want to revolutionalize the way we program brain-inspired systems and are plotting a course in a new publication with Steven Abreu: ieeexplore.ieee.org/abstract/doc... (or open access arxiv.org/abs/2410.22352)
Let's build better neuromorphics together! 🚀

Neuromorphic Programming: Emerging Directions for Brain-Inspired Hardware
The value of brain-inspired neuromorphic computers critically depends on our ability to program them for relevant tasks. Currently, neuromorphic hardware often relies on machine learning methods adapt...
ieeexplore.ieee.org
December 8, 2024 at 7:37 PM
Curious about #neuromorphic computing? 🧠💻
We want to revolutionalize the way we program brain-inspired systems and are plotting a course in a new publication with Steven Abreu: ieeexplore.ieee.org/abstract/doc... (or open access arxiv.org/abs/2410.22352)
Let's build better neuromorphics together! 🚀
We want to revolutionalize the way we program brain-inspired systems and are plotting a course in a new publication with Steven Abreu: ieeexplore.ieee.org/abstract/doc... (or open access arxiv.org/abs/2410.22352)
Let's build better neuromorphics together! 🚀
Reposted by Kalhan
New paper on covariant #neuromorphic networks!
We're connecting decades of work in computer vision with decades of work in spiking networks. And, in an event-based vision task against regular ANNs of similar complexity, spiking networks are doing much, much better!
www.nature.com/articles/s41...
We're connecting decades of work in computer vision with decades of work in spiking networks. And, in an event-based vision task against regular ANNs of similar complexity, spiking networks are doing much, much better!
www.nature.com/articles/s41...

Covariant spatio-temporal receptive fields for spiking neural networks - Nature Communications
Neuromorphic computing mimics brain efficiency but lacks theoretical guidance. Here, authors develop a computational foundation for processing signals in space and time in spiking neural networks that...
www.nature.com
September 5, 2025 at 9:05 PM
New paper on covariant #neuromorphic networks!
We're connecting decades of work in computer vision with decades of work in spiking networks. And, in an event-based vision task against regular ANNs of similar complexity, spiking networks are doing much, much better!
www.nature.com/articles/s41...
We're connecting decades of work in computer vision with decades of work in spiking networks. And, in an event-based vision task against regular ANNs of similar complexity, spiking networks are doing much, much better!
www.nature.com/articles/s41...
@ UKCI 2025 @edinburghnapier.bsky.social university.

September 4, 2025 at 3:42 PM
@ UKCI 2025 @edinburghnapier.bsky.social university.
Reposted by Kalhan
While some prefer humanoid robots for certain tasks, people generally prefer special purpose robots over humanoids.

Do People Really Want Humanoid Robots in Their Homes?
Investors are pouring billions into humanoid robots, but do people actually want them in their homes?
spectrum.ieee.org
September 3, 2025 at 12:01 PM
While some prefer humanoid robots for certain tasks, people generally prefer special purpose robots over humanoids.
Reposted by Kalhan
Aalto University course "Distributed Algorithms" starts tomorrow! All course material (including an online textbook and short videos) are freely available here: jukkasuomela.fi/da2020/

Juho Hirvonen and Jukka Suomela: Distributed Algorithms 2020
A free online textbook — introduction to the theory of distributed algorithms
jukkasuomela.fi
August 31, 2025 at 12:43 PM
Aalto University course "Distributed Algorithms" starts tomorrow! All course material (including an online textbook and short videos) are freely available here: jukkasuomela.fi/da2020/
Reposted by Kalhan
Engineers at Harvard have developed a soft, wearable robot that uses machine learning to respond to each user’s unique movements, which could provide personalised assistance to patients with neurodegenerative disease or people recovering from a stroke. 🤖 www.wevolver.com/article/a-we... #Robotics

A Wearable Robot That Learns
New control algorithm personalizes user experience for stroke, ALS patients
www.wevolver.com
August 29, 2025 at 3:30 PM
Engineers at Harvard have developed a soft, wearable robot that uses machine learning to respond to each user’s unique movements, which could provide personalised assistance to patients with neurodegenerative disease or people recovering from a stroke. 🤖 www.wevolver.com/article/a-we... #Robotics
Reposted by Kalhan

I can't* fathom why the top picture, and not the bottom picture, is the standard diagram for an autoencoder.
The whole idea of an autoencoder is that you complete a round trip and seek cycle consistency—why lay out the network linearly?
The whole idea of an autoencoder is that you complete a round trip and seek cycle consistency—why lay out the network linearly?

August 29, 2025 at 10:46 PM
I can't* fathom why the top picture, and not the bottom picture, is the standard diagram for an autoencoder.
The whole idea of an autoencoder is that you complete a round trip and seek cycle consistency—why lay out the network linearly?
The whole idea of an autoencoder is that you complete a round trip and seek cycle consistency—why lay out the network linearly?
Reposted by Kalhan
Researchers in Scotland created a robotic fiddler crab to study the claw-waving contests that males of the species use to attract a mate. But the robot, nicknamed "Wavy Dave", didn't come out of the experiments unscathed. 🤖 www.livescience.com/animals/crus... #Robots #Robotics

Watch robot crab 'Wavy Dave' get attacked in claw-waving contest with real crabs
Researchers have built a robot crab that can compete in claw-waving displays with real fiddler crabs, but "Wavy Dave" doesn't always come out unscathed.
www.livescience.com
August 27, 2025 at 10:28 AM
Researchers in Scotland created a robotic fiddler crab to study the claw-waving contests that males of the species use to attract a mate. But the robot, nicknamed "Wavy Dave", didn't come out of the experiments unscathed. 🤖 www.livescience.com/animals/crus... #Robots #Robotics
Reposted by Kalhan

Field day with #AIgro #robotics #agriculture. Robot is taking pictures to predict yield and spot diseases, plagues etc.


August 1, 2025 at 9:19 AM
Field day with #AIgro #robotics #agriculture. Robot is taking pictures to predict yield and spot diseases, plagues etc.
Reposted by Kalhan

Major milestone in Reinforcement Learning 🚀
In under just 1 hour of training, our AI Agent can now automate tasks requiring complex physics and object interactions. Done for the first time on 100$ robot arms.
Watch as it recovers when the cube gets stuck 🤯
In under just 1 hour of training, our AI Agent can now automate tasks requiring complex physics and object interactions. Done for the first time on 100$ robot arms.
Watch as it recovers when the cube gets stuck 🤯
March 14, 2025 at 2:00 PM
Major milestone in Reinforcement Learning 🚀
In under just 1 hour of training, our AI Agent can now automate tasks requiring complex physics and object interactions. Done for the first time on 100$ robot arms.
Watch as it recovers when the cube gets stuck 🤯
In under just 1 hour of training, our AI Agent can now automate tasks requiring complex physics and object interactions. Done for the first time on 100$ robot arms.
Watch as it recovers when the cube gets stuck 🤯
Reposted by Kalhan
📢 New Episode Alert!
This week, I chatted to Prof. Kaspar Althoefer from Queen Mary University of London about soft #robotic manipulators for healthcare and manufacturing. 🤖 🖐️
Listen now: www.robottalk.org/2025/03/14/e... #Robots #Robotics #Prosthetics #Surgery #Manufacturing
This week, I chatted to Prof. Kaspar Althoefer from Queen Mary University of London about soft #robotic manipulators for healthcare and manufacturing. 🤖 🖐️
Listen now: www.robottalk.org/2025/03/14/e... #Robots #Robotics #Prosthetics #Surgery #Manufacturing

Episode 113 – Soft robotic hands - Robot Talk
Claire chatted to Kaspar Althoefer from Queen Mary University of London about soft robotic manipulators for healthcare and manufacturing.
www.robottalk.org
March 14, 2025 at 12:05 PM
📢 New Episode Alert!
This week, I chatted to Prof. Kaspar Althoefer from Queen Mary University of London about soft #robotic manipulators for healthcare and manufacturing. 🤖 🖐️
Listen now: www.robottalk.org/2025/03/14/e... #Robots #Robotics #Prosthetics #Surgery #Manufacturing
This week, I chatted to Prof. Kaspar Althoefer from Queen Mary University of London about soft #robotic manipulators for healthcare and manufacturing. 🤖 🖐️
Listen now: www.robottalk.org/2025/03/14/e... #Robots #Robotics #Prosthetics #Surgery #Manufacturing
Reposted by Kalhan

Starter pack including some of the lab members: go.bsky.app/QK8j87w
March 14, 2025 at 10:34 AM
Starter pack including some of the lab members: go.bsky.app/QK8j87w
Reposted by Kalhan
Experimenting with our new robot on wheels on toy tasks 🪀
End-to-end imitation learning is so powerful!
A neural network is taking cameras and motors information as input, and directly outputting motors position.
No need for depth, bounding box, 3D reconstruction, SLAM.
End-to-end imitation learning is so powerful!
A neural network is taking cameras and motors information as input, and directly outputting motors position.
No need for depth, bounding box, 3D reconstruction, SLAM.
March 10, 2025 at 10:04 AM
Experimenting with our new robot on wheels on toy tasks 🪀
End-to-end imitation learning is so powerful!
A neural network is taking cameras and motors information as input, and directly outputting motors position.
No need for depth, bounding box, 3D reconstruction, SLAM.
End-to-end imitation learning is so powerful!
A neural network is taking cameras and motors information as input, and directly outputting motors position.
No need for depth, bounding box, 3D reconstruction, SLAM.