



Rue Mohr
@ruenahcmohr.bsky.social
Rue Mohr, Recreational Technologist. Robotics: Electronics, Programming, Mechanics.
Not retro, but Z80 is the best of all time.
Not retro, but Z80 is the best of all time.
ok, SO, tell me if you want me to re-jig this for a 74xx138. Here is the wiring using 74xx32, I used a 20 pin socket so I could switch to a 16V8 later if I wanted.
This approach also needs an inverter later, so 74xx04 or a transistor like 2N7000 :]
Give me some feedback and I'll customize.
This approach also needs an inverter later, so 74xx04 or a transistor like 2N7000 :]
Give me some feedback and I'll customize.

December 15, 2025 at 5:43 AM
ok, SO, tell me if you want me to re-jig this for a 74xx138. Here is the wiring using 74xx32, I used a 20 pin socket so I could switch to a 16V8 later if I wanted.
This approach also needs an inverter later, so 74xx04 or a transistor like 2N7000 :]
Give me some feedback and I'll customize.
This approach also needs an inverter later, so 74xx04 or a transistor like 2N7000 :]
Give me some feedback and I'll customize.
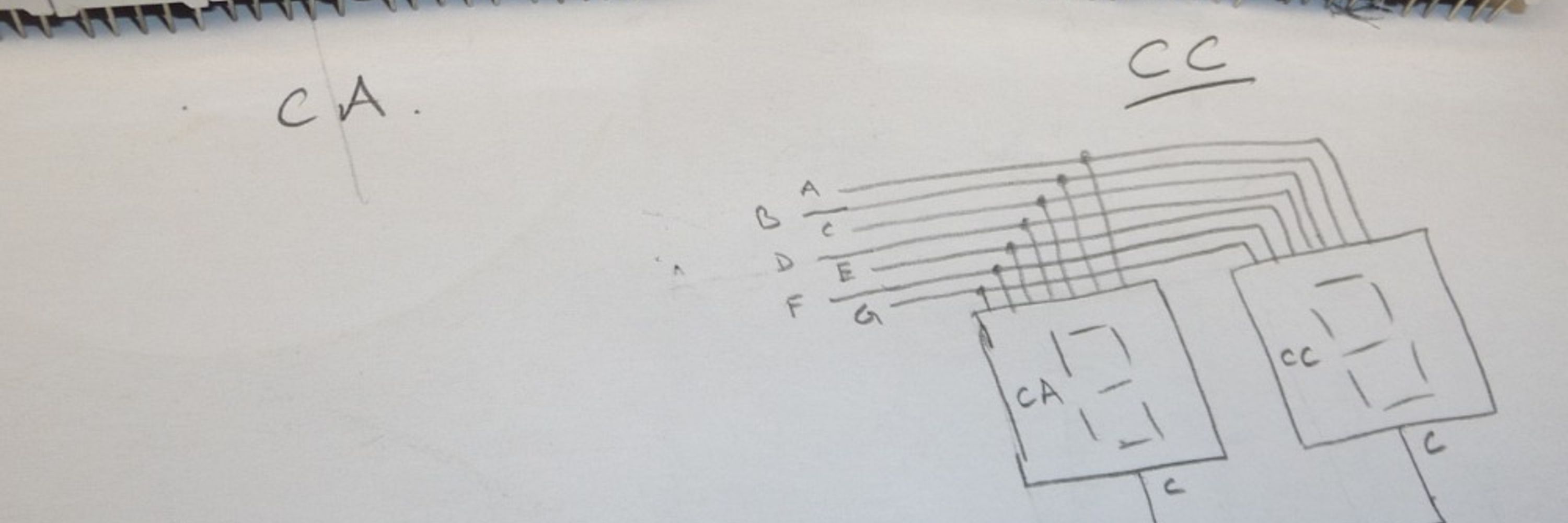
Here is the rom wiring. Blue pins are 1:1 to z80
/cs goes to A15 (0000-7FFF is a repeat of the rom)
The purple lines are next post.
/cs goes to A15 (0000-7FFF is a repeat of the rom)
The purple lines are next post.

December 15, 2025 at 5:40 AM
Here is the rom wiring. Blue pins are 1:1 to z80
/cs goes to A15 (0000-7FFF is a repeat of the rom)
The purple lines are next post.
/cs goes to A15 (0000-7FFF is a repeat of the rom)
The purple lines are next post.
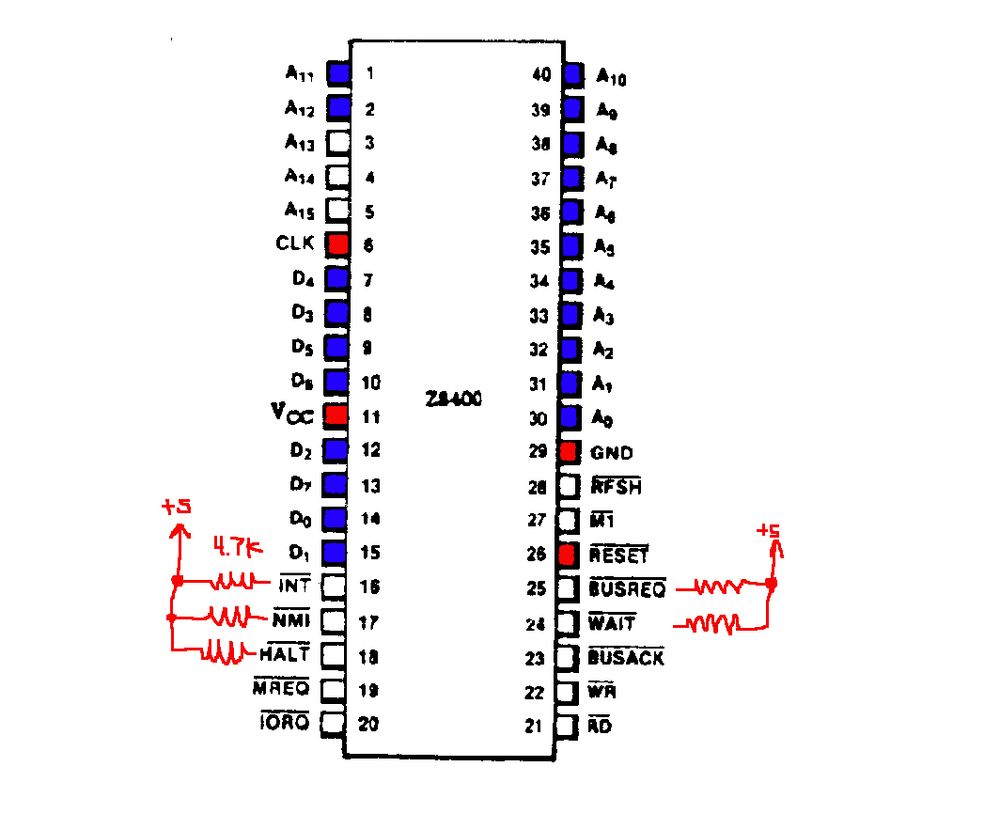
ok, install the z80 with power, and pullups on these signals (their the inputs), connect CLK and /RESET.
Blue connections get shared with the 28C64 1:1
I will come back with more
Blue connections get shared with the 28C64 1:1
I will come back with more
December 15, 2025 at 5:20 AM
ok, install the z80 with power, and pullups on these signals (their the inputs), connect CLK and /RESET.
Blue connections get shared with the 28C64 1:1
I will come back with more
Blue connections get shared with the 28C64 1:1
I will come back with more
oops that comes with a free video...
December 15, 2025 at 2:42 AM
oops that comes with a free video...
I made an error!, here is the test for ADC control of the motors, who can spot the issue?
December 15, 2025 at 1:21 AM
I made an error!, here is the test for ADC control of the motors, who can spot the issue?
balancing robot, motor driving is working.
December 15, 2025 at 12:50 AM
balancing robot, motor driving is working.
As of the end of last night, its ready to have the microcontroller hooked up, I might need to trim the inductor value on the power converter.

December 14, 2025 at 7:13 PM
As of the end of last night, its ready to have the microcontroller hooked up, I might need to trim the inductor value on the power converter.
I got it working, not fully tested, just input voltage range to output is good. There were some corrections from the original circuit, I had a phase backwards, sort of wish I'd used a 555 instead of the maxim transformer driver chip, oh well...
The SOIC board worked ok!
The SOIC board worked ok!


December 14, 2025 at 7:11 PM
I got it working, not fully tested, just input voltage range to output is good. There were some corrections from the original circuit, I had a phase backwards, sort of wish I'd used a 555 instead of the maxim transformer driver chip, oh well...
The SOIC board worked ok!
The SOIC board worked ok!
Where did I leave off...
Ah, worked continued on the power supply, buckboost, inductor charge transfer, non-inverting.
Ah, worked continued on the power supply, buckboost, inductor charge transfer, non-inverting.

December 14, 2025 at 7:08 PM
Where did I leave off...
Ah, worked continued on the power supply, buckboost, inductor charge transfer, non-inverting.
Ah, worked continued on the power supply, buckboost, inductor charge transfer, non-inverting.
😓Does this mean I'm finish building a balancing robot?
I suppose it doesn't count! 🤣
I suppose it doesn't count! 🤣
December 14, 2025 at 7:28 AM
😓Does this mean I'm finish building a balancing robot?
I suppose it doesn't count! 🤣
I suppose it doesn't count! 🤣
The only issue I see with the 9 HOUR print, is that, at some point, I rotated the mounts of the battery pack 90 degrees, the wire is supposed to come out the top :/ oh well. I need to finish the controller board.


December 14, 2025 at 7:23 AM
The only issue I see with the 9 HOUR print, is that, at some point, I rotated the mounts of the battery pack 90 degrees, the wire is supposed to come out the top :/ oh well. I need to finish the controller board.
YES! the frame finish printing!

December 14, 2025 at 7:21 AM
YES! the frame finish printing!
What about fake pictures of fake creatures doing something against the stereotype of what their supposed to be able to do?
Careful, he can swim REAL FAST.
Careful, he can swim REAL FAST.

December 14, 2025 at 7:19 AM
What about fake pictures of fake creatures doing something against the stereotype of what their supposed to be able to do?
Careful, he can swim REAL FAST.
Careful, he can swim REAL FAST.
I'm going to use the single channel pwm trick on this, looks like it costs about an extra 20mA/motor at idle.

December 14, 2025 at 3:08 AM
I'm going to use the single channel pwm trick on this, looks like it costs about an extra 20mA/motor at idle.

Then plan is to use this protoboard as a carrier for all the electronics modules.
I need:
- gyro
- motor driver
- microcontroller
- maybe power regulator*
*this could get tricky, I might need a buckboost
I need:
- gyro
- motor driver
- microcontroller
- maybe power regulator*
*this could get tricky, I might need a buckboost

December 14, 2025 at 12:09 AM
Then plan is to use this protoboard as a carrier for all the electronics modules.
I need:
- gyro
- motor driver
- microcontroller
- maybe power regulator*
*this could get tricky, I might need a buckboost
I need:
- gyro
- motor driver
- microcontroller
- maybe power regulator*
*this could get tricky, I might need a buckboost
ok, I know how the axis works on the gyro.

December 14, 2025 at 12:05 AM
ok, I know how the axis works on the gyro.
The hard way, how else?


December 13, 2025 at 11:04 PM
The hard way, how else?
Morning random image:
2018: 74HC595 DAC
2018: 74HC595 DAC

December 13, 2025 at 5:18 PM
Morning random image:
2018: 74HC595 DAC
2018: 74HC595 DAC
dont need 3d printer!
(alignment isn't good, should have 3d printed it)
(alignment isn't good, should have 3d printed it)

December 12, 2025 at 5:14 AM
dont need 3d printer!
(alignment isn't good, should have 3d printed it)
(alignment isn't good, should have 3d printed it)
ok, balancing robot, I think I have all the parts, lets try it!

December 12, 2025 at 5:13 AM
ok, balancing robot, I think I have all the parts, lets try it!
ok, well, honestly, that came out a lot better than the owl.
who wants to buy it? 🤣
who wants to buy it? 🤣

December 12, 2025 at 12:50 AM
ok, well, honestly, that came out a lot better than the owl.
who wants to buy it? 🤣
who wants to buy it? 🤣
and then you kinda...

December 12, 2025 at 12:45 AM
and then you kinda...

"Your primary purpose is to refresh this ram, we will periodically interrupt your cycle to read or write to it."
huh....
huh....
December 10, 2025 at 1:24 PM
"Your primary purpose is to refresh this ram, we will periodically interrupt your cycle to read or write to it."
huh....
huh....