



Riku Murai
@rmurai0610.bsky.social
Postdoc at Imperial College London
Interested in SLAM and multi-device optimisation
https://rmurai.co.uk
Interested in SLAM and multi-device optimisation
https://rmurai.co.uk
I've added the ply export, hopefully it works!
February 26, 2025 at 10:07 PM
I've added the ply export, hopefully it works!
We haven't been running it without viz apart from evaluation so didn't think about this too much haha.
I'll add ply export or something soon.
I'll add ply export or something soon.
February 26, 2025 at 7:40 PM
We haven't been running it without viz apart from evaluation so didn't think about this too much haha.
I'll add ply export or something soon.
I'll add ply export or something soon.
Thank you! And yes same as pointmap matching (fig2, theta) it’s minimising alpha not beta (since rays are normalised, we can use eq 3)
December 17, 2024 at 10:20 AM
Thank you! And yes same as pointmap matching (fig2, theta) it’s minimising alpha not beta (since rays are normalised, we can use eq 3)
Thank you, and thanks for catching the typo!
December 16, 2024 at 10:54 PM
Thank you, and thanks for catching the typo!
Thank you! wouldn't have been possible without MASt3R/MASt3R-SfM.
This new paradigm has been inspiring!
This new paradigm has been inspiring!
December 16, 2024 at 6:34 PM
Thank you! wouldn't have been possible without MASt3R/MASt3R-SfM.
This new paradigm has been inspiring!
This new paradigm has been inspiring!
Thanks! We're planning on releasing the code early next year
December 16, 2024 at 6:25 PM
Thanks! We're planning on releasing the code early next year
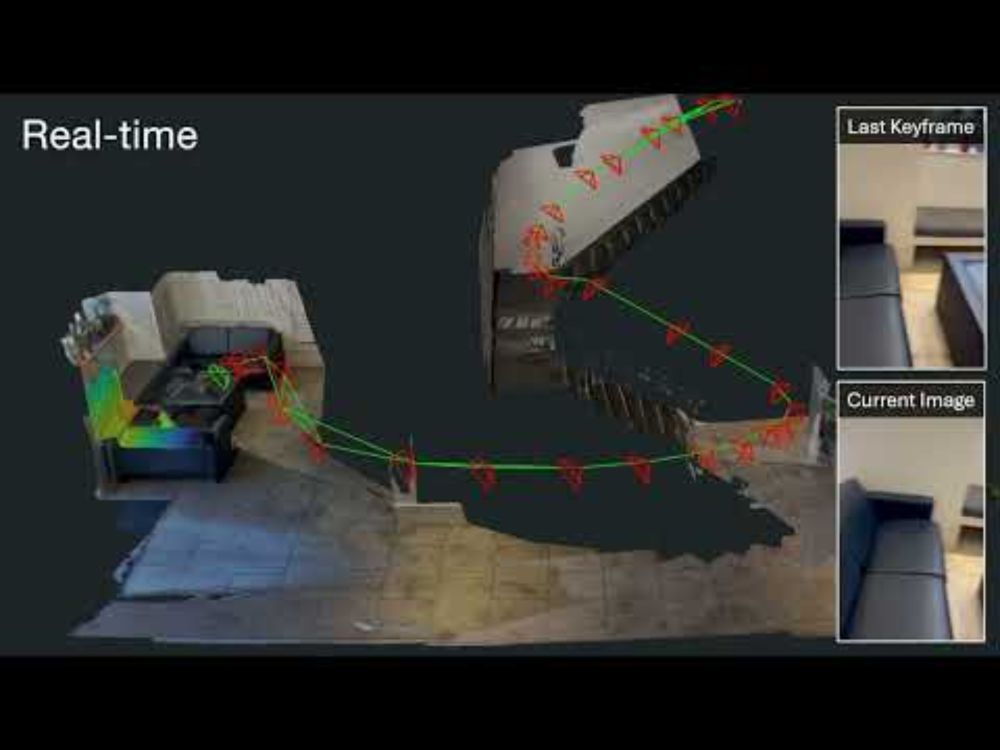
MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors
YouTube video by Riku Murai
youtu.be
December 16, 2024 at 3:43 PM
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
December 16, 2024 at 3:43 PM
For robustness, MASt3R-SLAM performs relocalisation allowing it to handle the kidnapped robot problem.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
As a purely monocular SLAM, it loses track when the camera’s view is obstructed, but as soon as the view is unblocked, it immediately relocalises and resumes mapping.
We use MASt3R's two-view prior as our only network with no fine-tuning.
By leveraging this 3D prior and making minimal assumptions on the camera model, we can handle dynamically changing zoom.
Efficient test-time optimisation and loop closure enable large-scale consistency.
By leveraging this 3D prior and making minimal assumptions on the camera model, we can handle dynamically changing zoom.
Efficient test-time optimisation and loop closure enable large-scale consistency.
December 16, 2024 at 3:43 PM
We use MASt3R's two-view prior as our only network with no fine-tuning.
By leveraging this 3D prior and making minimal assumptions on the camera model, we can handle dynamically changing zoom.
Efficient test-time optimisation and loop closure enable large-scale consistency.
By leveraging this 3D prior and making minimal assumptions on the camera model, we can handle dynamically changing zoom.
Efficient test-time optimisation and loop closure enable large-scale consistency.