




Martin Sundermeyer
@masundermeyer.bsky.social
3D Computer Vision & ML
Research Scientist @Google
Research Scientist @Google
Seriously impressive demo by Boston Dynamics showing full body manipulation. This shows interaction with a complex environment rather than treating it as a disturbance like in all the robot dance videos.
youtu.be/HYwekersccY?...
youtu.be/HYwekersccY?...

Getting a Leg up with End-to-end Neural Networks | Boston Dynamics
YouTube video by Boston Dynamics
youtu.be
August 20, 2025 at 9:18 PM
Seriously impressive demo by Boston Dynamics showing full body manipulation. This shows interaction with a complex environment rather than treating it as a disturbance like in all the robot dance videos.
youtu.be/HYwekersccY?...
youtu.be/HYwekersccY?...
If you are at #CVPR_2025 today and into robotics, join our Workshop on Perception for Industrial Robotics Automation. We present the results of a joint pose estimation and grasping challenge on real robots, organized with #OpenCV and #Intrinsic, and announce 60k$ in prices.
CVPR 2025 Workshop - Perception for Industrial Robotics Automation (PIRA)
pira-workshop.github.io
June 12, 2025 at 12:33 PM
If you are at #CVPR_2025 today and into robotics, join our Workshop on Perception for Industrial Robotics Automation. We present the results of a joint pose estimation and grasping challenge on real robots, organized with #OpenCV and #Intrinsic, and announce 60k$ in prices.
Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
10th International Workshop on Recovering 6D Object Pose (R6D)
cmp.felk.cvut.cz
May 23, 2025 at 12:34 PM
Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
Real-time processing of sensor streams is crucial for robotics and AR. We introduce Troy-Vis, a real-time, open-vocabulary video instance segmentation method which will be presented in an oral presentation at WACV tomorrow.
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
GitHub - google-research/troyvis
Contribute to google-research/troyvis development by creating an account on GitHub.
github.com
March 2, 2025 at 8:48 PM
Real-time processing of sensor streams is crucial for robotics and AR. We introduce Troy-Vis, a real-time, open-vocabulary video instance segmentation method which will be presented in an oral presentation at WACV tomorrow.
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
In collaboration with Intrinsic and OpenCV we are running a new pose estimation + bin picking challenge that is decided by real robot grasp metrics. 🦾
Take the chance to bring your methods alive, win generous prices and present your approach at CVPR'25. 🏆
Take the chance to bring your methods alive, win generous prices and present your approach at CVPR'25. 🏆

New Year, new Competition! The OpenCV Perception Challenge For Bin-Picking is a robotics and AI competition, focused on solving a real-world robotics problem and using real-life robot arms. Join a team and create the most accurate model to win a share of the $60k in prizes! youtu.be/kXsr5_v3Tho

OpenCV Perception Challenge for Bin-Picking Launch Video (Sponsored by Intrinsic)
YouTube video by OpenCV
youtu.be
January 12, 2025 at 10:24 PM
In collaboration with Intrinsic and OpenCV we are running a new pose estimation + bin picking challenge that is decided by real robot grasp metrics. 🦾
Take the chance to bring your methods alive, win generous prices and present your approach at CVPR'25. 🏆
Take the chance to bring your methods alive, win generous prices and present your approach at CVPR'25. 🏆
I'm still not used to generating realistic 4K videos in 1-2 minutes.. Glitches occur less frequently and physics are often imitated impressively well. #Veo2
youtu.be/w-lfkTrijv4?...
youtu.be/w-lfkTrijv4?...

Veo2 Test // 100 Reasons
YouTube video by hellolaco
youtu.be
January 1, 2025 at 11:50 AM
I'm still not used to generating realistic 4K videos in 1-2 minutes.. Glitches occur less frequently and physics are often imitated impressively well. #Veo2
youtu.be/w-lfkTrijv4?...
youtu.be/w-lfkTrijv4?...
Reposted by Martin Sundermeyer
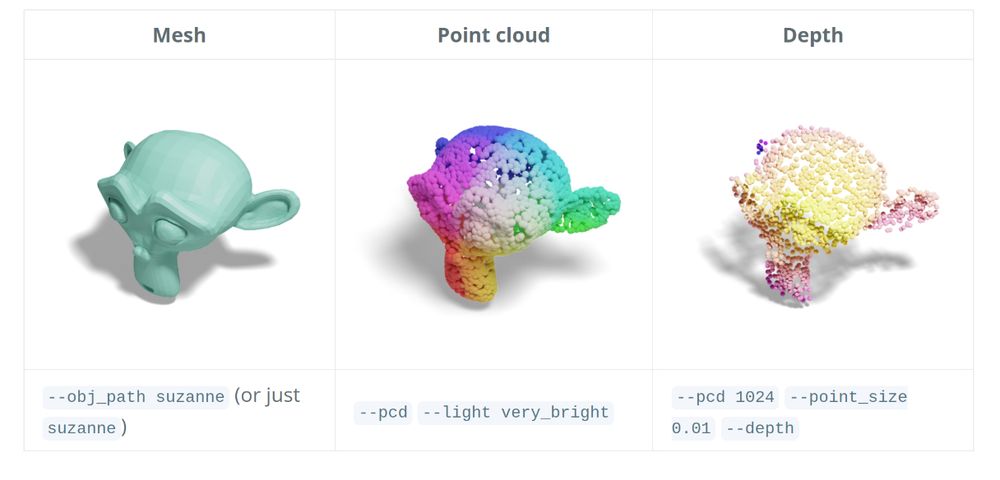
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
December 9, 2024 at 10:11 AM
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
hummat.github.io/bproc-pubvis/
Reposted by Martin Sundermeyer

1/ Excited to share that our latest work from Intrinsic will be presented as a paper at SIGGRAPH Asia 2024! 🎉
We’ve developed a plenoptic 3D vision system that addresses a key challenge in industrial robotics: providing robots reliable 3D input data. 🧵⬇️
We’ve developed a plenoptic 3D vision system that addresses a key challenge in industrial robotics: providing robots reliable 3D input data. 🧵⬇️
November 27, 2024 at 12:57 AM
1/ Excited to share that our latest work from Intrinsic will be presented as a paper at SIGGRAPH Asia 2024! 🎉
We’ve developed a plenoptic 3D vision system that addresses a key challenge in industrial robotics: providing robots reliable 3D input data. 🧵⬇️
We’ve developed a plenoptic 3D vision system that addresses a key challenge in industrial robotics: providing robots reliable 3D input data. 🧵⬇️
Submitted a 6D Object Pose Estimation method at CVPR? 📝
Show the world that it actually works in practice and join the BOP challenge. 🦾
7 days left to win the BOP 2024 awards in the model-based and model-free tracks. 🏆
Show the world that it actually works in practice and join the BOP challenge. 🦾
7 days left to win the BOP 2024 awards in the model-based and model-free tracks. 🏆
BOP: Benchmark for 6D Object Pose Estimation
bop.felk.cvut.cz
November 22, 2024 at 6:45 PM
Submitted a 6D Object Pose Estimation method at CVPR? 📝
Show the world that it actually works in practice and join the BOP challenge. 🦾
7 days left to win the BOP 2024 awards in the model-based and model-free tracks. 🏆
Show the world that it actually works in practice and join the BOP challenge. 🦾
7 days left to win the BOP 2024 awards in the model-based and model-free tracks. 🏆