



@arhanjain.bsky.social
Reposted

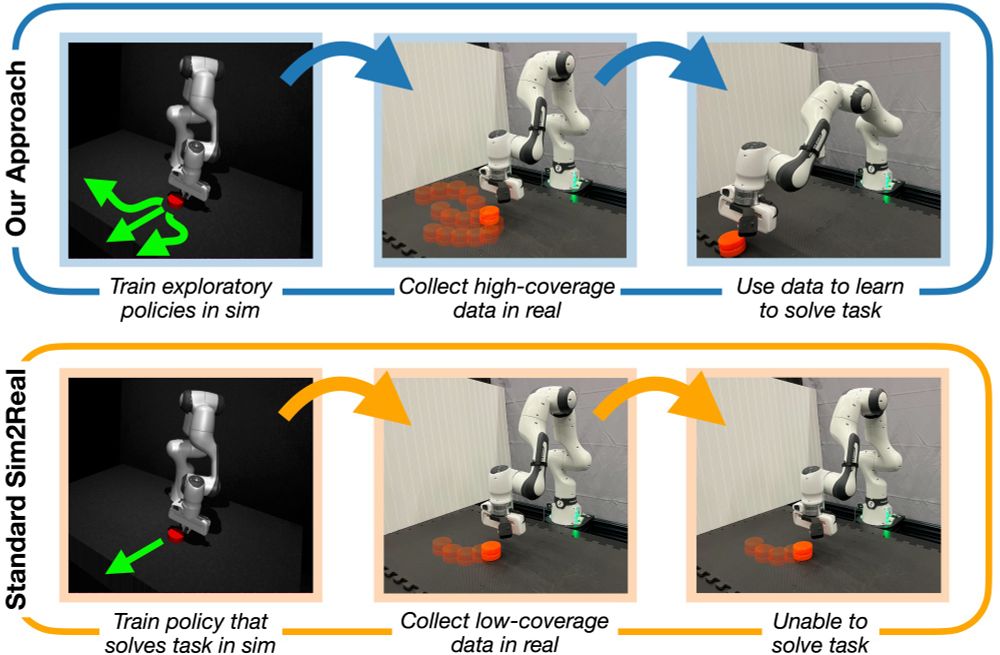
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
December 6, 2024 at 12:46 AM
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
Real-world data collection is expensive and slow. How can we alleviate the effort of data collection, while allowing policies to continuously improve!?
Checkout our latest work - Robot Learning with Super Linear Scaling :)
casher-robot-learning.github.io/CASHER/
(1/N)
Checkout our latest work - Robot Learning with Super Linear Scaling :)
casher-robot-learning.github.io/CASHER/
(1/N)

December 5, 2024 at 5:48 AM
Real-world data collection is expensive and slow. How can we alleviate the effort of data collection, while allowing policies to continuously improve!?
Checkout our latest work - Robot Learning with Super Linear Scaling :)
casher-robot-learning.github.io/CASHER/
(1/N)
Checkout our latest work - Robot Learning with Super Linear Scaling :)
casher-robot-learning.github.io/CASHER/
(1/N)
Reposted
I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)
December 5, 2024 at 2:13 AM
I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)